Los 5 tipos de robots industriales más utilizados por las empresas
Sin duda, y como lo hemos visto a través de todo nuestro blog, los sistemas automatizados son el siguiente gran paso de la industria de la Soldadura. Pero para entender de una forma más profunda esta evolución, es necesario que nos adentremos al origen de sus componentes esenciales, es decir, a los tipos de robots industriales a los cuales podemos acceder.
Así que, acompáñenos y conozca las principales características y particularidades de cada uno de estos 5 tipos de robots industriales. Conozca más sobre este importante tema del mundo industrial.
¿Qué es un robot industrial?
Primero, y de acuerdo con la Asociación de Industrias de Robótica (RIA, Robotic Industry Association), un robot industrial es “un manipulador multifuncional reprogramable, capaz de mover materias, piezas, herramientas, o dispositivos especiales, según trayectorias variables, programadas para realizar tareas diversas».
O, en otras palabras, una máquina o mecanismo articulado entre sí, el cual tiene 3 distintivos esenciales:
- Es multifuncional.
- Puede ser controlado por un operador humano o un dispositivo lógico.
- Es reprogramable.
Y todo sin hacer modificaciones físicas al robot pues está diseñado, justamente, para realizar tareas variadas y cíclicas que pueden adaptarse.
¿Cómo se conforma un robot industrial?
Además de estas características que definen a los robots industriales, usted también podrá observar que los robots industriales se componen de una estructura parecida, la cual tiene 4 componentes esenciales:
- Tienen un brazo mecánico con capacidad de manipulación, el cual puede ser controlado.
- Se componen de elementos estructurales rígidos, llamados eslabones o enlaces.
- Estos son conectados por articulaciones, las cuales pueden ser lineales o rotatorias.
- Terminan en puntos terminales “manipuladores” los cuales pueden ser pinzas o herramientas.
Lo cual permite al robot su “especialización”, es decir, su uso en una aplicación en particular, como, por ejemplo, en los procesos de Soldadura por resistencia.
Tipos de robots industriales
Y justamente esta estructura, es la que nos lleva a las diferenciaciones en los tipos de robots industriales, comenzando por 6 parámetros que los definirán posteriormente:
- Grados de libertad: Es decir, la suma de las articulaciones que lo componen.
- Espacio de accesibilidad: El número de puntos accesibles al punto terminal, dependiente de la configuración geométrica.
- Capacidad de posicionamiento: El cual mide el grado de exactitud de los movimientos en una tarea programada.
- Capacidad de carga: Peso que puede transportar.
- Velocidad: Máxima velocidad que se puede alcanzar.
Analizando estos elementos, más la configuración geométrica de los robots, ahora sí, podemos determinar 5 tipos fundamentales de robots industriales:
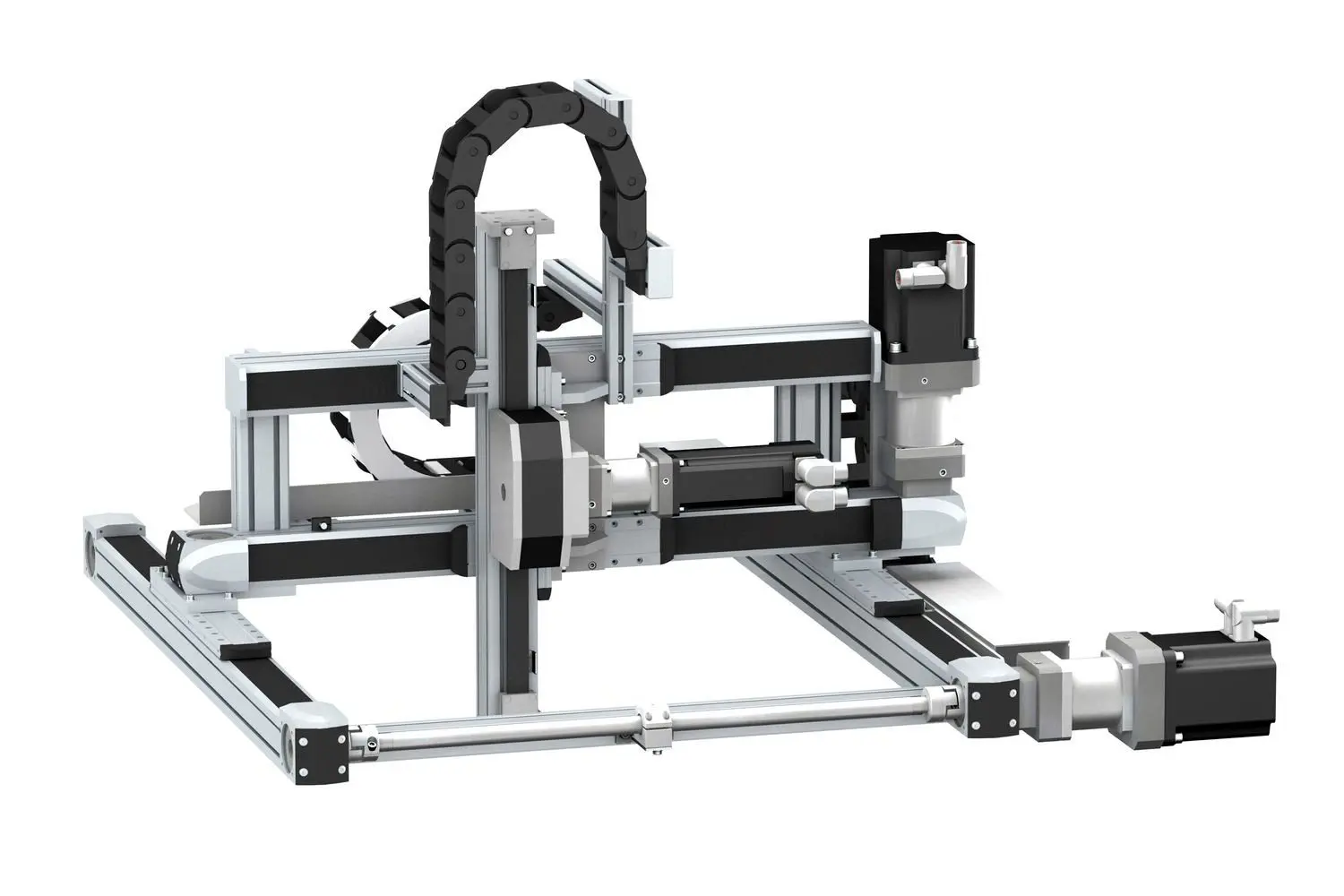
Tipo 1: Robot industrial cartesiano
Esencialmente los robots industriales cartesianos se distinguen por posicionarse mediante 3 articulaciones lineales, generando movimientos perpendiculares de acuerdo con los 3 ejes cartesianos X, Y y Z.
Así mismo, este tipo de robot industrial le ofrece 3 beneficios esenciales:
- Buen nivel de precisión y repetibilidad.
- Facilidad de programación.
- Costo económico.
Por lo cual, puede ser considerado como la solución de menor costo para la industria de la Soldadura, pues puede realizar operaciones simples como soldar, colocar o escoger de forma eficiente y barata.
Tipo 2: Robot industrial Scara
No obstante que este tipo de robot industrial también se desplaza en los mismos planos cartesianos que el anterior, este se diferencia por incorporar un eje final del plano Z para hacer girar la herramienta o pinza al final del brazo robótico.
Por lo tanto, usted encontrará que los robots Scara son excelentes para procesos de ensamblaje, aunque no son tan universales, puesto que la terminación del brazo limita su alcance.

Tipo 3: Robot industrial cíclico
Mientras que los robots anteriores se centran en tener una postura determinada para una posición, este tipo de robot industrial se diferencia, esencialmente, por poder contar con diferentes posturas para una sola posición.
Una analogía muy utilizada que usted puede usar para comprender su funcionamiento es la de compararlo con un brazo humano, mismo que puede sostener algo fijo, mientras mueve el hombro y el codo. Es decir, estos robots pueden colocar su herramienta o pinza en una posición determinada, pero con diferentes posturas.
Tipo 4: Robot industrial de 6 ejes
También llamado de 6 grados de libertad; pues sus articulaciones pueden colocar su herramienta o pinza en una posición con 3 orientaciones, es decir, con 3 movimientos.
Lo anterior, le permite tener una mejor capacidad de flexibilidad para los diferentes trabajos o aplicaciones industriales, teniendo la capacidad de convertirse en robots colaborativos.

Tipo 5: Robot industrial de doble brazo
Por último, uno de los tipos de robots industriales más complejos, pues este consta de 2 brazos que trabajan armónicamente sobre una sola pieza de trabajo.
Para esto, están dotados en su mayoría de funciones de visión y detección de fuerza, pues tienen la increíble capacidad de ejecutar tareas autónomas, en las cuales pueden tomar decisiones y actividades tan complejas, como el reconocimiento de formas y objetos, o el ajuste de cantidades y fuerzas.

Robots para automatizar su industria
Además de todos estos tipos de robots industriales, es importante mencionarle, que usted también puede encontrar subclasificaciones por sus movimientos y tipos de articulaciones, habiendo robots de tipo:
- Cilíndrico: Con articulación de base rotacional y lineales para movimientos de altura y radio.
- Polar o esférico: Base giratoria con 2 articulaciones rotacionales y 1 lineal, pudiendo desplazar el brazo en una zona esférica.
- Paralelo: Con articulaciones rotacionales o prismáticas.
- Mixto: Con diferentes tipos de articulaciones.
Por lo tanto, es esencial que usted realice un análisis a conciencia de las necesidades de sus procesos, pues de ello dependerá la selección del tipo de robot industrial más adecuado para su empresa.
No obstante, no cabe duda de que el paso ya está dado: la automatización con robots industriales ya es un hecho y usted tiene que ser parte de ella.